

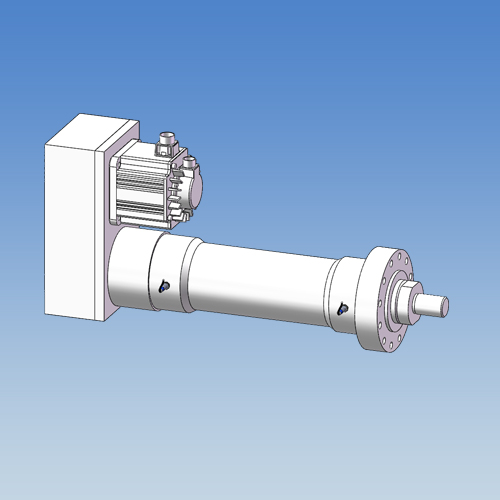
DMC166系列 折返式-前法兰
DMC166-20300 电动缸技术参数表
| DMC166折返式选型参数 | |||||||||||
| 产品系列 | 丝杆导程 (mm) | 额定出力 (kN) | zui大出力 (kN) | 额定速度 (mm/s) | zui高速度(mm/s) | zui大行程(mm) | 丝杆额定动载(kN) | 重复定位精度(mm) | 轴向间隙(mm) | zui大加速度(m/s2) | 内部防转机构 |
| DMC166 | 10 | 100 | 200 | 200 | 250 | 3000 | 150 | 0.01 | 0.01 | 10 | 有/无 |
| 20 | 150 | 200 | 400 | 500 | 3000 | 460 | 0.01 | 0.01 | 10 | 有/无 | |
| 40 | 150 | 200 | 800 | 1000 | 3000 | 460 | 0.01 | 0.01 | 10 | 有/无 | |
| 结构类型 | 折返式 | ||||||||||
| 减速机减速比 | 无/有,1:3/1:4/1:5/1:7/1:10/1:9/1:12/1:15/1:16/1:20等 | ||||||||||
| 缸体安装方式 | 前法兰/后法兰/侧法兰/耳轴/尾铰(单片/双片) | ||||||||||
| 杆端连接方式 | 外螺纹/内螺纹/关节轴承/前铰(单片/双片) | ||||||||||
| 电机驱动方式 | 伺服/交流/直流/变频/步进/手动 日系:松下/安川/三菱/富士/欧姆龙等,欧美:AB/SEW/B&R/倍福/伦茨/施耐德/西门子等 | ||||||||||
| 限位开关 | 无/有,磁感应式/接近式,PNP/NPN,常开/常闭 | ||||||||||
| 压力传感器 | 无/有,拉力方向,压力方向,拉压双方向,量程200KN | ||||||||||
| 缸体基本重量(kg) | 55 | ||||||||||
| 每100mm行程重量(kg) | 13 | ||||||||||

三自由度平台控制系统由计算机控制系统、伺服驱动系统、平台执行机构组成。 计算机控制系统主要包括上位机、实时控制计算机和数据采集卡等,伺服驱动系统主要由全数字驱动器和伺服电机组成,平台执行机构由运动平台机构及设备组成。平台系统在控制系统检测和控制下运转。 主控制回路:上位机经过网络通讯,把希冀运动位姿和控制命令传输给实时控制计算机,实时控制计算机经过位姿转换和解算,计算出三只电动缸的运动参数(电动缸位移量),把相应的位移量传送给相应的驱动器,驱动伺服电机运转,进而完成电动缸的直线运动;同时下位机经过得到电机的实践位置经过转换和解算后,将平台姿势发送给上位机。